Testen van de
hovercraft
Op vrijdag 13 juni hebben we de met de hovercraft
deelgenomen aan een wedstrijd. Voor onze hovercraft was dit zijn eerste test op
het water. Tijdens deze tests werd er gekeken naar hoe snel een parkoers kon
worden afgelegd. Verder werd er gekeken naar de wendbaarheid van de hovercraft.
Ook hebben we moeten kijken of we de voedselsupplementen op de juist manier
konden droppen. Wij als groep drie hebben dit als volgt gedaan.
Onderdeel
|
Aantal punten
|
Drag race:
|
2
|
Slalom
|
2
|
Boeiengooien:
|
-2
|
Totaal
|
2
|
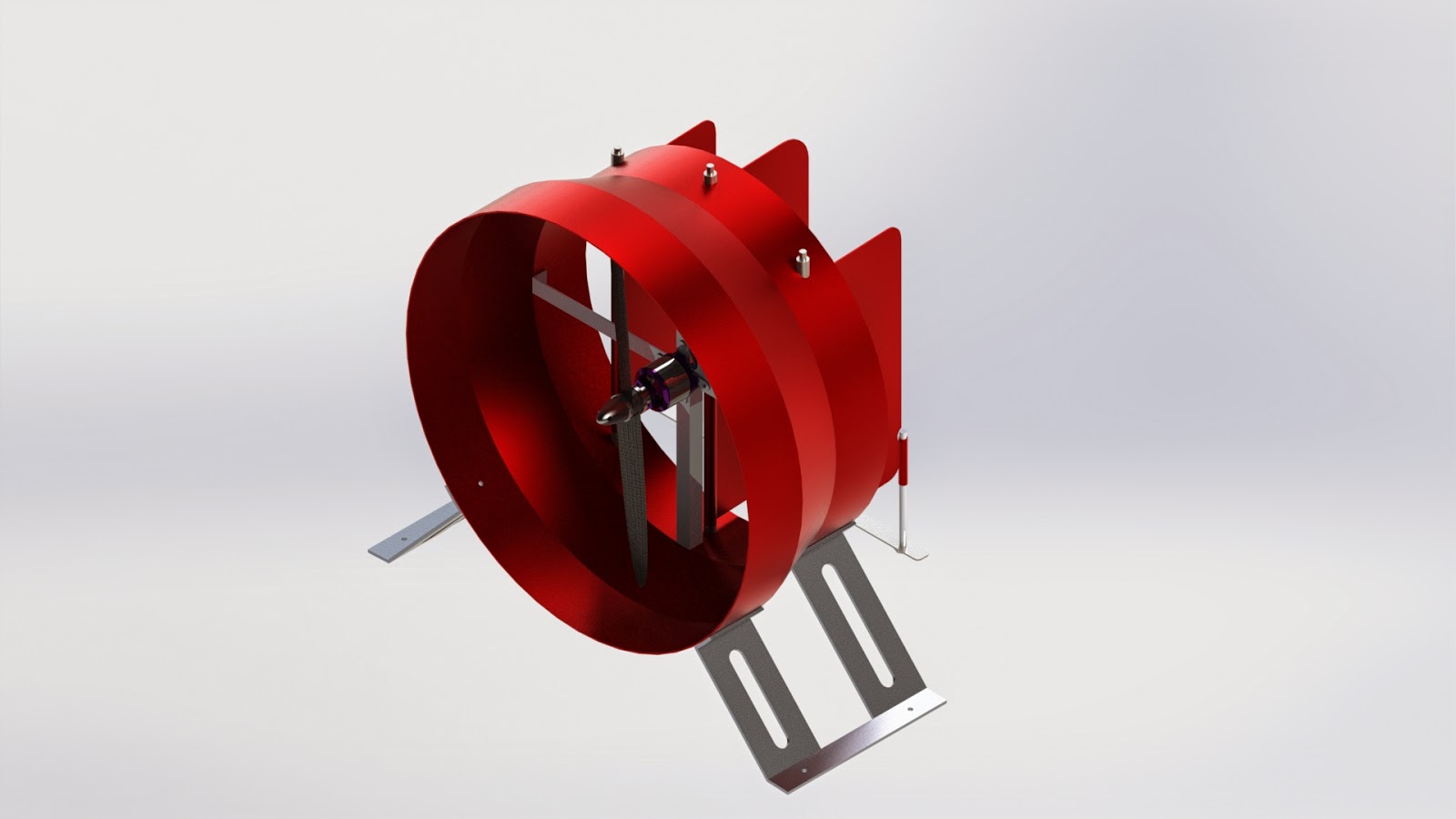
Wat ging goed: de
thrustmotor en de liftmotor hebben prima gefunctioneerd. De stuurflappen reageerde
ook goed op de bewegingen. Verder was de hovercraft goed in evenwicht ook de
onderdelen die niet nat mochten worden zijn droog gebleven.
Wat ging er niet goed: De rok van de hovercraft schepte
water waardoor hij geen snelheid kon maken. Door een verkeerde materiaal en
vormkeuze van de rok kon er geen snelheid worden gemaakt. Verder was het niet
mogelijk om de ballen te droppen omdat de buis een te kleine diameter had. Dit vond
ik erg jammer. Door de verkeerde materiaalkeuze was het jammer genoeg niet
mogelijk.
Ik heb dit blok als zeer leerzaam ervaren, vooral het werken
met het v-model was wennen. Verder heb ik ook arduino als zeer leerzaam ervaren
en wil ik mee hierin gaan verbeteren. Daarnaast ben ik blij met het
uiteindelijke resultaat al heeft het wel veel meer tijd gevergd dan ik had
verwacht.